About us
Dissemination
Gallery
More information
Private
Results
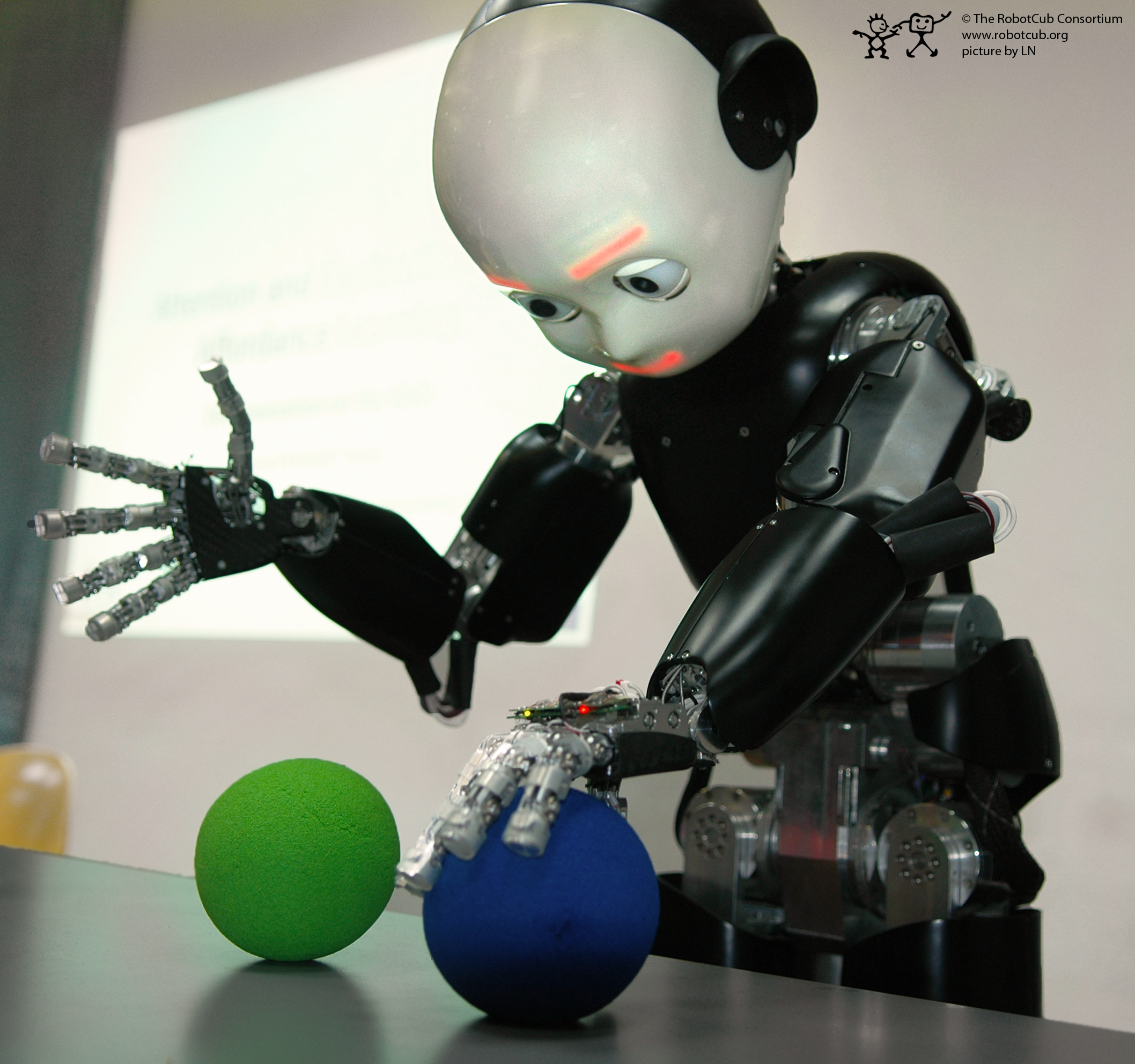
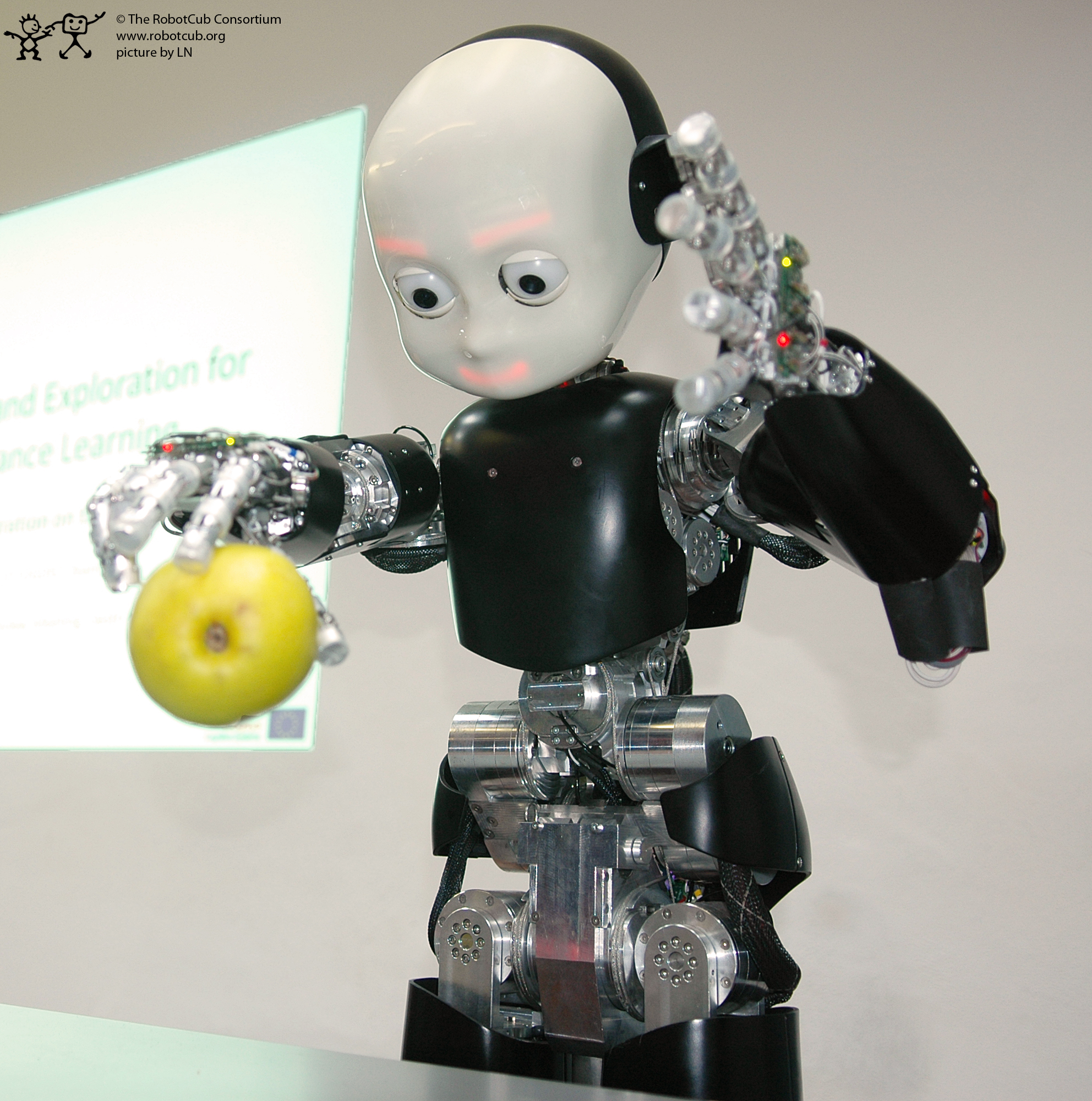
Robotic implementation of models of sensory-motor coordination for reaching and grasping tasks (by SSSA).
{kind=link}
{kind=link}